Publications
Here is a list of academic publications for which I am a co-author. Where possible, I have added links to the full text, cover image, supplementary information, and associated code.
2024
-
 Restoring brain connectivity by phrenic nerve stimulation in sedated and mechanically ventilated patientsThiago Bassi, Elizabeth Rohrs E, Melodie Parfait, and 8 more authorsCommunications Medicine, 2024
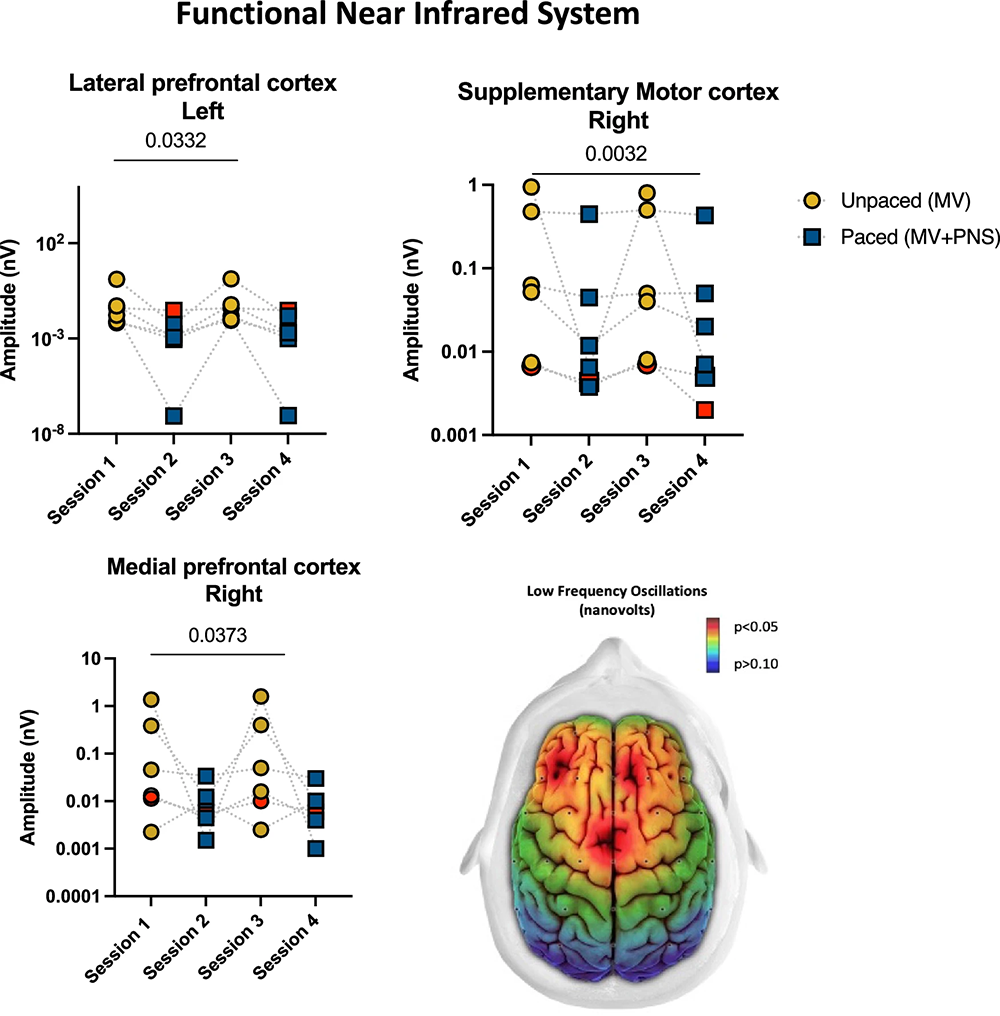
Restoring brain connectivity by phrenic nerve stimulation in sedated and mechanically ventilated patientsThiago Bassi, Elizabeth Rohrs E, Melodie Parfait, and 8 more authorsCommunications Medicine, 2024Background In critically ill patients, deep sedation and mechanical ventilation suppress the brain-diaphragm-lung axis and are associated with cognitive issues in survivors. Methods This exploratory crossover design study investigates whether phrenic nerve stimulation can enhance brain activity and connectivity in six deeply sedated, mechanically ventilated patients with acute respiratory distress syndrome. Results Our findings indicate that adding phrenic stimulation on top of invasive mechanical ventilation in deeply sedated, critically ill, moderate acute respiratory distress syndrome patients increases cortical activity, connectivity, and synchronization in the frontaltemporal-parietal cortices. Conclusions Adding phrenic stimulation on top of invasive mechanical ventilation in deeply sedated, critically ill, moderate acute respiratory distress syndrome patients increases cortical activity, connectivity, and synchronization. The observed changes resemble those during diaphragmatic breathing in awake humans. These results suggest that phrenic nerve stimulation has the potential to restore the brain-diaphragm-lung crosstalk when it has been shut down or impaired by mechanical ventilation and sedation. Further research should evaluate the clinical significance of these results.
-
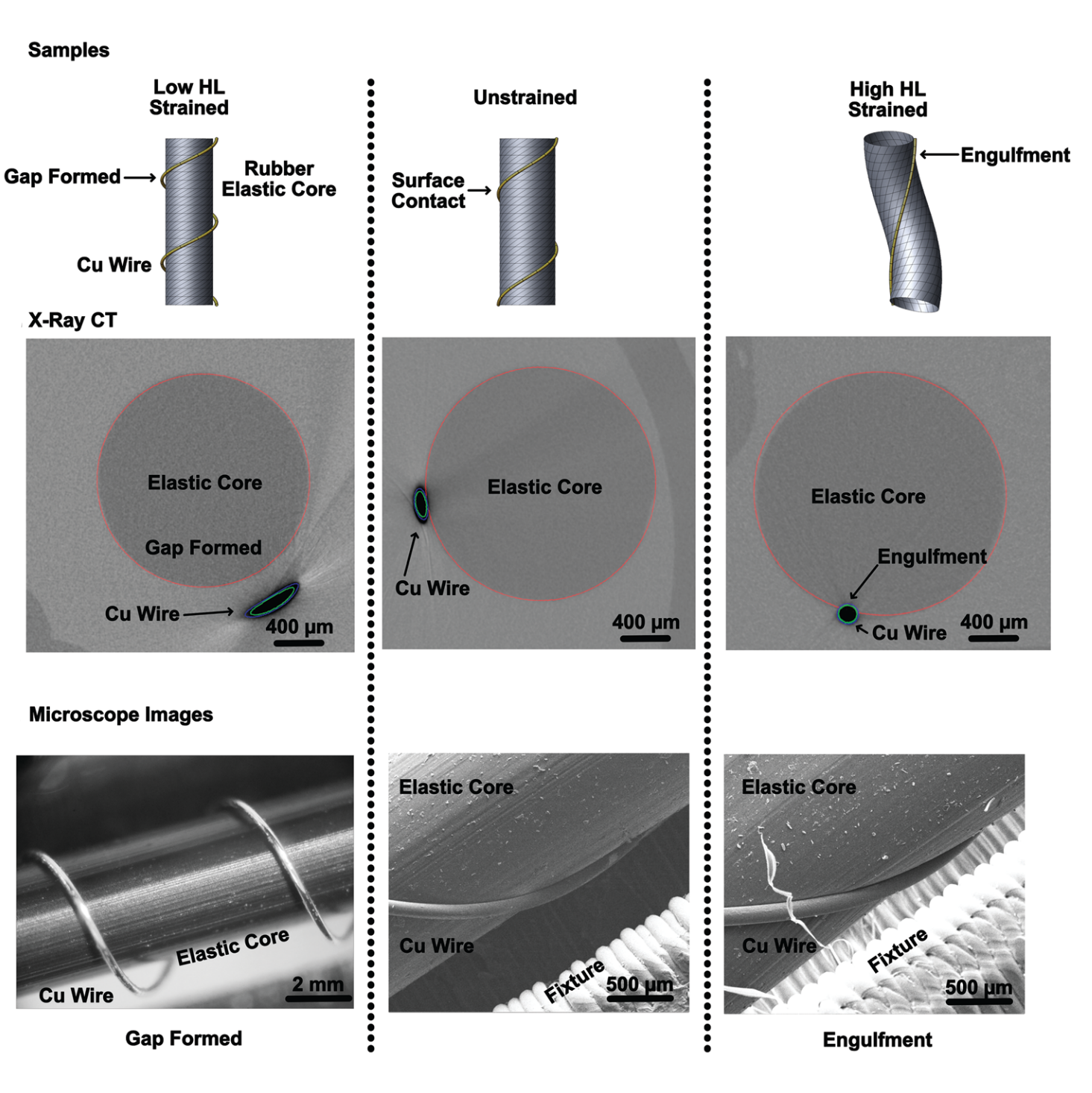
 Unobtrusive Movement Monitoring with Textiles Using Fibre SensorsBrett C. HanniganETH Zürich, 2024
Unobtrusive Movement Monitoring with Textiles Using Fibre SensorsBrett C. HanniganETH Zürich, 2024This thesis deals with the development of fibre sensor materials and methods to unobtrusively monitor human movements with textiles. Advances in materials science have allowed electronic components to be fabricated as fibres, yarns, or textile structures, leading to an explosion of research interest in "e-textiles" and soft electronics. Motion tracking, which was once restricted to expensive and spatially constrained gait laboratories, can take advantage of this progress to enable human kinematic measurements to be taken anywhere and at lower cost. Rehabilitation, sports science, occupational health, and consumer electronics all benefit in a shift from rigid, uncomfortable electronic devices to those seamlessly integrated in everyday clothing. Notable limitations with the current state of the art for functionalized textiles are the unreliability of connections between textile substrates and conventional electronics as well as the incompatibility of ad-hoc sensor-connection placement with textile mass production methods. This thesis is concerned with advancing the ability to monitor movement by improving the sensing elements and practicality of wearable systems. Herein, several strain sensor technologies are compared that have the potential to be fully integrated into clothing in order to infer human motion via the stretching of an athletic garment. An improved sensor yarn design is proposed, motivated by the findings from of the comparison. This fibre uses a helical yarn structure to overcome an especially critical limitation of soft capacitive sensors: achieving a higher than expected sensitivity to strain. The sensor further presents some interesting properties that suggest a method to maximize the amount of information gained from a single fibre. Its sensitivity is mechanically tunable along its length to target specific regions where strain is concentrated, e.g. at the joints. The electrical model of such a sensor has parameters distributed in space along the fibre. Together, these permit the measurement of strain at multiple locations with a single connection point, considerably simplifying the problem of connections. Toward this end, an electronic system combined with the sensing fibre demonstrates distributed sensing of strain in a benchtop experiment and even joint angle in a prototype garment. The latter system can infer the angle of the shoulder, elbow, and wrist to within 5°, the first example of this concept in a wearable device. A common theme throughout the thesis is using modelling for insight and design optimization. A geometrical model of the sensing fibre is presented and used to improve its design, predict its signal, and investigate the mechanism behind its high sensitivity. An electrical model of the sensor is presented, which is used to show feasibility of multiple strain readout and establish a general method of identifying distributed parameters from data. Some final experiments explore the future goal of eliminating the single remaining connection, allowing strain information from across the body to be transmitted wirelessly without rigid electronics on the clothing.
-
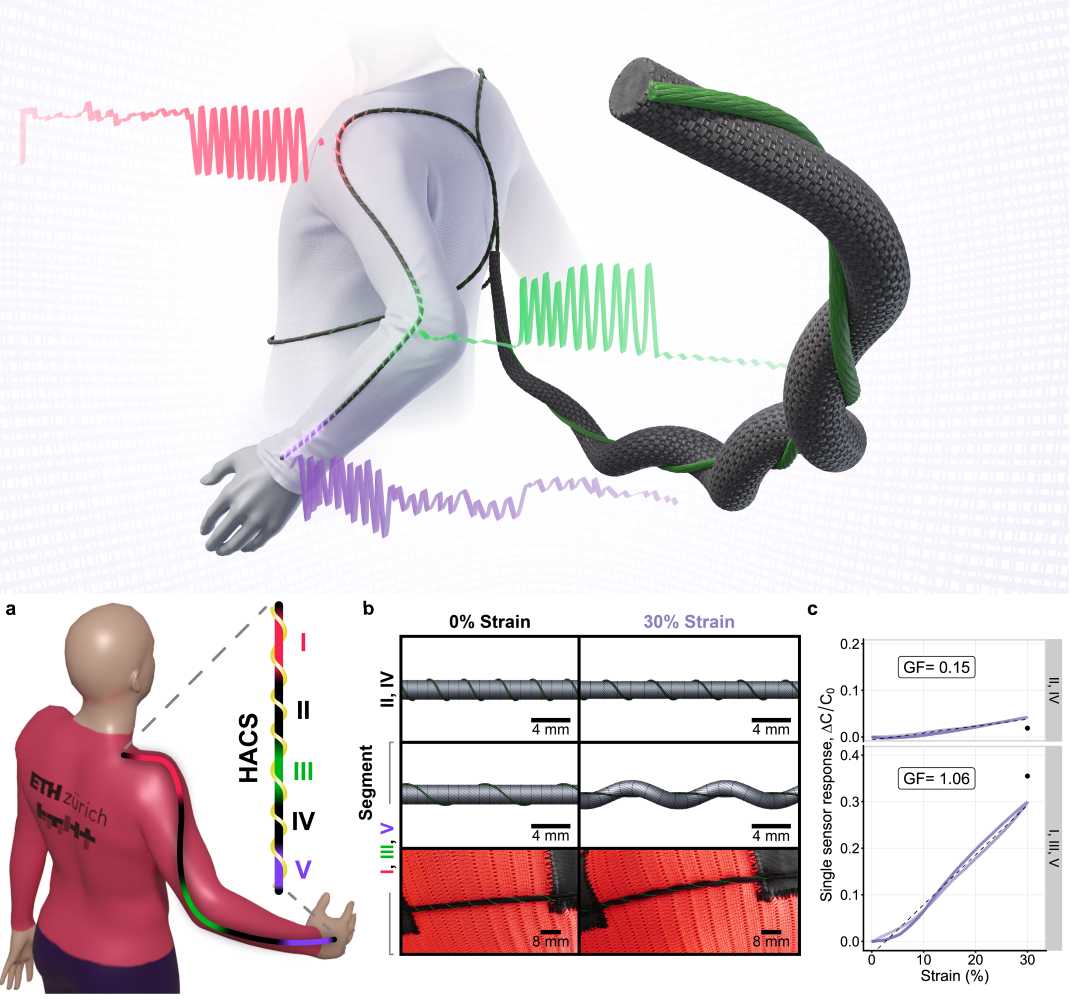 Distributed Sensing Along Fibres for Smart ClothingBrett C. Hannigan, Tyler J. Cuthbert, Chakaveh Ahmadizadeh, and 1 more authorScience Advances, 2024
Distributed Sensing Along Fibres for Smart ClothingBrett C. Hannigan, Tyler J. Cuthbert, Chakaveh Ahmadizadeh, and 1 more authorScience Advances, 2024Textile sensors transform our everyday clothing into a means to track movement and bio-signals in a completely unobtrusive way. One major hindrance to the adoption of “smart” clothing is the difficulty encountered with connections and space when scaling up the number of sensors. There is a lack of research addressing a key limitation in wearable electronics: connections between rigid and textile elements are often unreliable and they require interfacing sensors in a way incompatible with textile mass production methods. We introduce a prototype garment, compact readout circuit, and algorithm to measure localized strain along multiple regions of a fibre. We employ a helical auxetic yarn sensor with tunable sensitivity along its length to selectively respond to strain signals. We demonstrate distributed sensing in clothing, monitoring arm joint angles from a single continuous fibre. Compared to optical motion capture, we achieve around 5° error in reconstructing shoulder, elbow, and wrist joint angles.
-
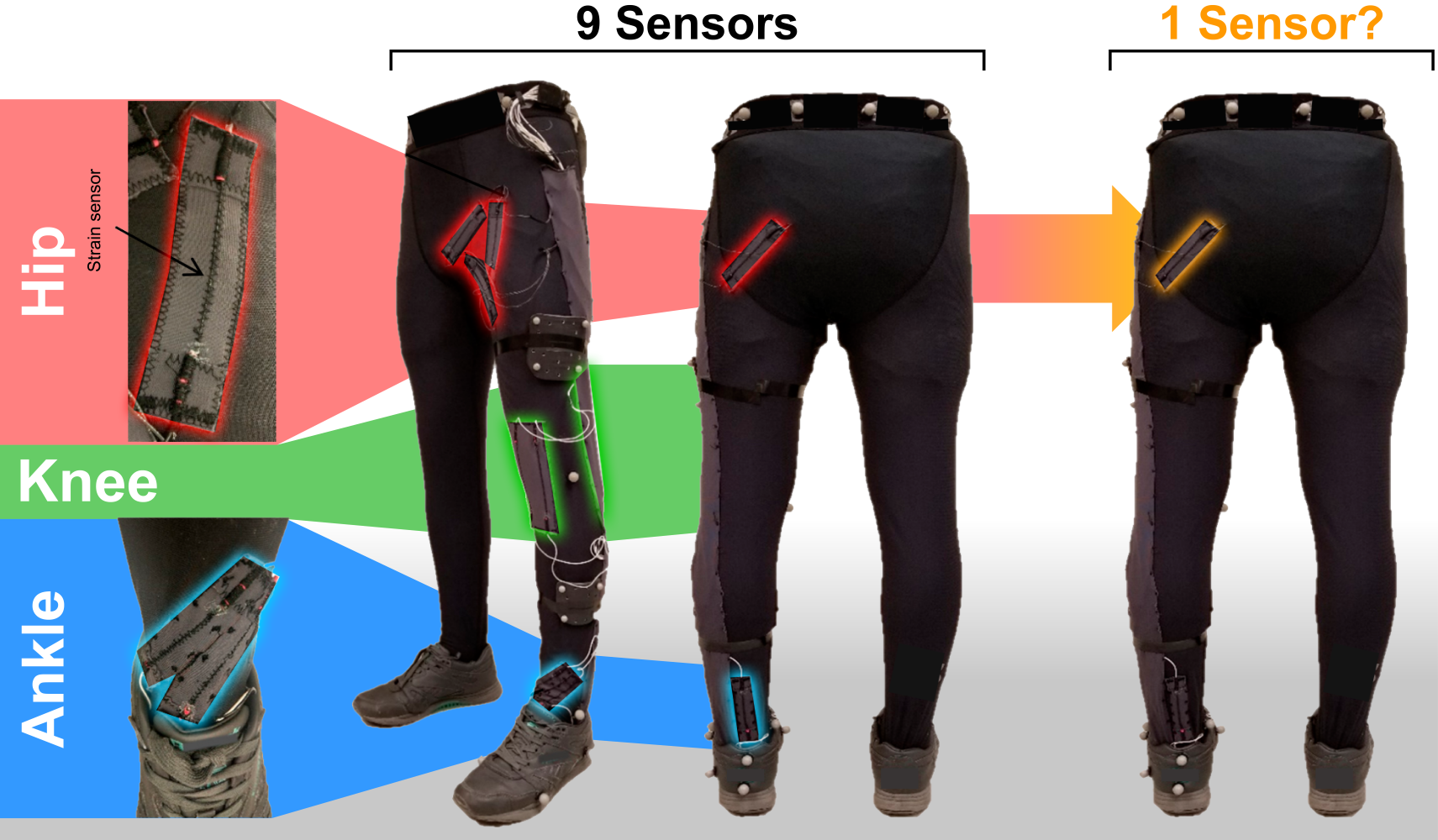 Optimizing wearable motion tracking by assessing sagittal joint angle accuracy with minimal sensor useBrett C. Hannigan, Moe Elgendi, Mohsen Gholami, and 1 more authorIn Current Issues in Sport Science, 2024
Optimizing wearable motion tracking by assessing sagittal joint angle accuracy with minimal sensor useBrett C. Hannigan, Moe Elgendi, Mohsen Gholami, and 1 more authorIn Current Issues in Sport Science, 2024Wearable motion tracking technology often focuses on reducing the number of sensors to simplify design and lower costs. Research has shown that single IMUs can reconstruct leg kinematics (Gholami et al., 2020; Hossain et al., 2022; Lim et al., 2020) and ground reaction forces (Jiang et al., 2020) effectively. Additionally, model-based methods have demonstrated the feasibility of using fewer gyroscopes to estimate stride length and motion range in healthy individuals and patients with coxarthritis (Salarian et al., 2013). In this study, we aim to assess the precision of sagittal joint angle estimations using strain sensors while minimizing sensor count.




2023
-
 HACS4x: Four-Ply Helical Auxetic Capacitive Sensors for Strain Sensing E-TextilesBrett C. Hannigan, Tyler J. Cuthbert, and Carlo MenonIn 5th International Conference on the Challenges, Opportunities, Innovations and Applications in Electronic Textiles, 2023
HACS4x: Four-Ply Helical Auxetic Capacitive Sensors for Strain Sensing E-TextilesBrett C. Hannigan, Tyler J. Cuthbert, and Carlo MenonIn 5th International Conference on the Challenges, Opportunities, Innovations and Applications in Electronic Textiles, 2023In this article, we show the first capacitive strain sensor using a four-component helical auxetic yarn (HAY) structure. We demonstrate a prototype sensor that achieves a gauge factor (GF) of up to two and compare our experimental results with a simple geometric model of the HAY system. In addition to a high sensitivity, this sensor configuration is easily manufactured, suitable for textile integration, and produces a repeatable response.
-
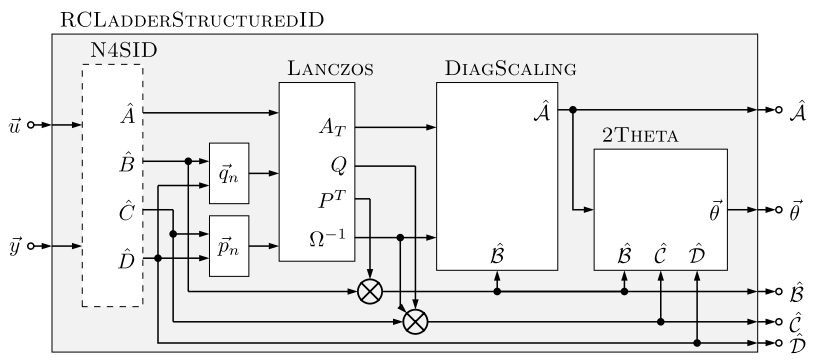 Fast, Analytical Method for Structured Identification of SISO RC-Ladder-Type SystemsBrett C. Hannigan, and Carlo MenonIEEE Transactions on Circuits and Systems II: Express Briefs, 2023
Fast, Analytical Method for Structured Identification of SISO RC-Ladder-Type SystemsBrett C. Hannigan, and Carlo MenonIEEE Transactions on Circuits and Systems II: Express Briefs, 2023Structured system identification often requires solving optimization problems that are not deterministic in computation time and may converge to a local optimum. For the case of systems that can be represented as a SISO “RC- ladder” impedance network, this paper presents a closed-form algorithm that can determine the structured state-space matrices and extract the parameters from an arbitrarily transformed system, such as that produced by subspace system identification. This algorithm relies on a modified version of the Lanczos tridiagonalization process and the solving of a least squares problem with dimension equal to the system order. It is fast, deterministic, and successful for systems of low to moderate order. Practical applications include network synthesis, thermal model identification, and distributed sensing reconstruction, where exact RC parameter values must be identified from data.
-
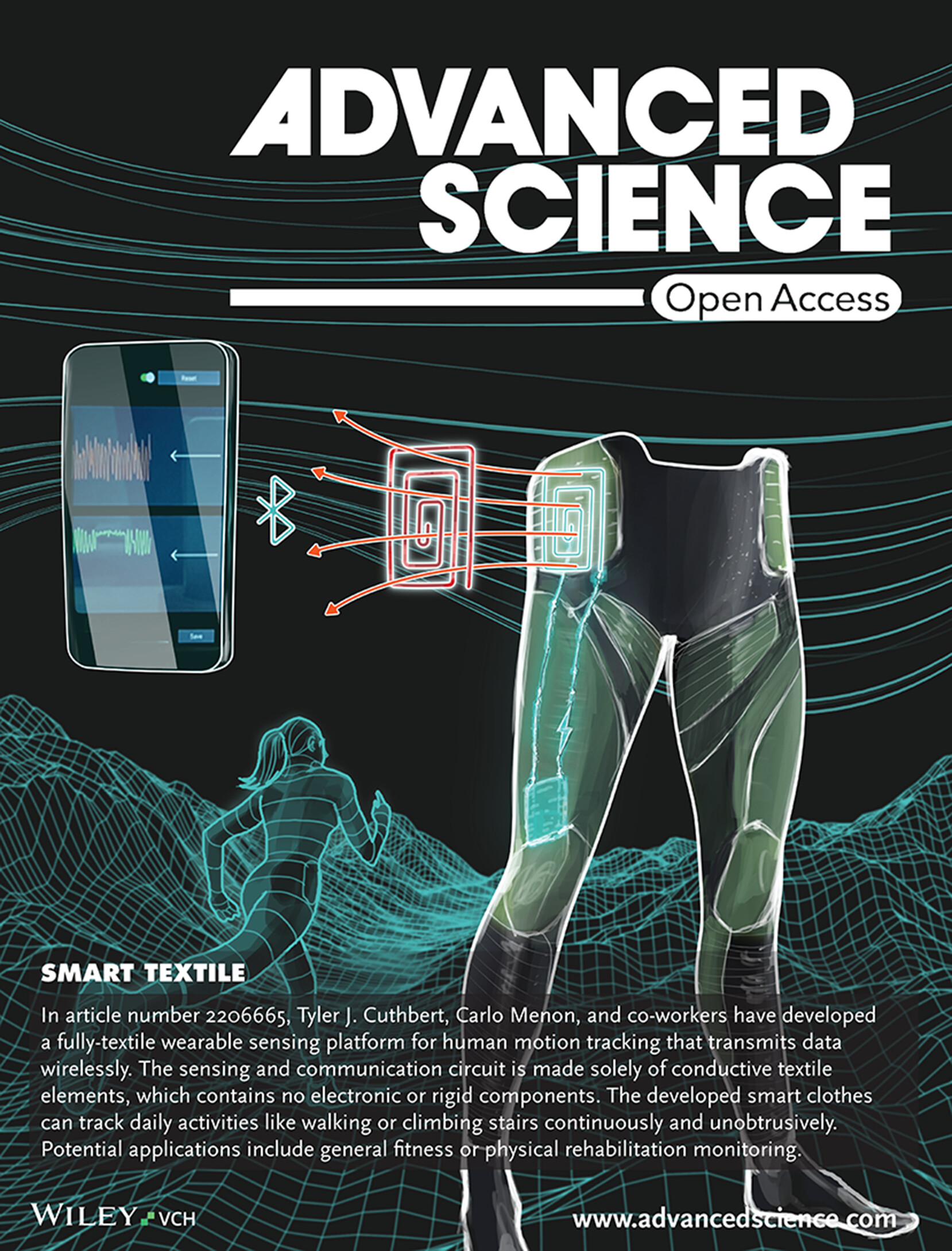 Passive and Wireless All-Textile Wearable Sensor SystemValeria Galli, Sunil Kumar Sailapu, Tyler J. Cuthbert, and 3 more authorsAdvanced Science, 2023
Passive and Wireless All-Textile Wearable Sensor SystemValeria Galli, Sunil Kumar Sailapu, Tyler J. Cuthbert, and 3 more authorsAdvanced Science, 2023Mobile health technology and activity tracking with wearable sensors enable continuous unobtrusive monitoring of movement and biophysical parameters. Advancements in clothing-based wearable devices have employed textiles as transmission lines, communication hubs, and various sensing modalities; this area of research is moving towards complete integration of circuitry into textile components. A current limitation for motion tracking is the need for communication protocols demanding physical connection of textile with rigid devices, or vector network analyzers (VNA) with limited portability and lower sampling rates. Inductor–capacitor (LC) circuits are ideal candidates as textile sensors can be easily implemented with textile components and allow wireless communication. In this paper, the authors report a smart garment that can sense movement and wirelessly transmit data in real time. The garment features a passive LC sensor circuit constructed of electrified textile elements that sense strain and communicate through inductive coupling. A portable, lightweight reader (fReader) is developed for achieving a faster sampling rate than a downsized VNA to track body movement, and for wirelessly reading sensor information suitable for deployment with a smartphone. The smart garment–fReader system monitors human movement in real-time and exemplifies the potential of textile-based electronics moving forward.
-
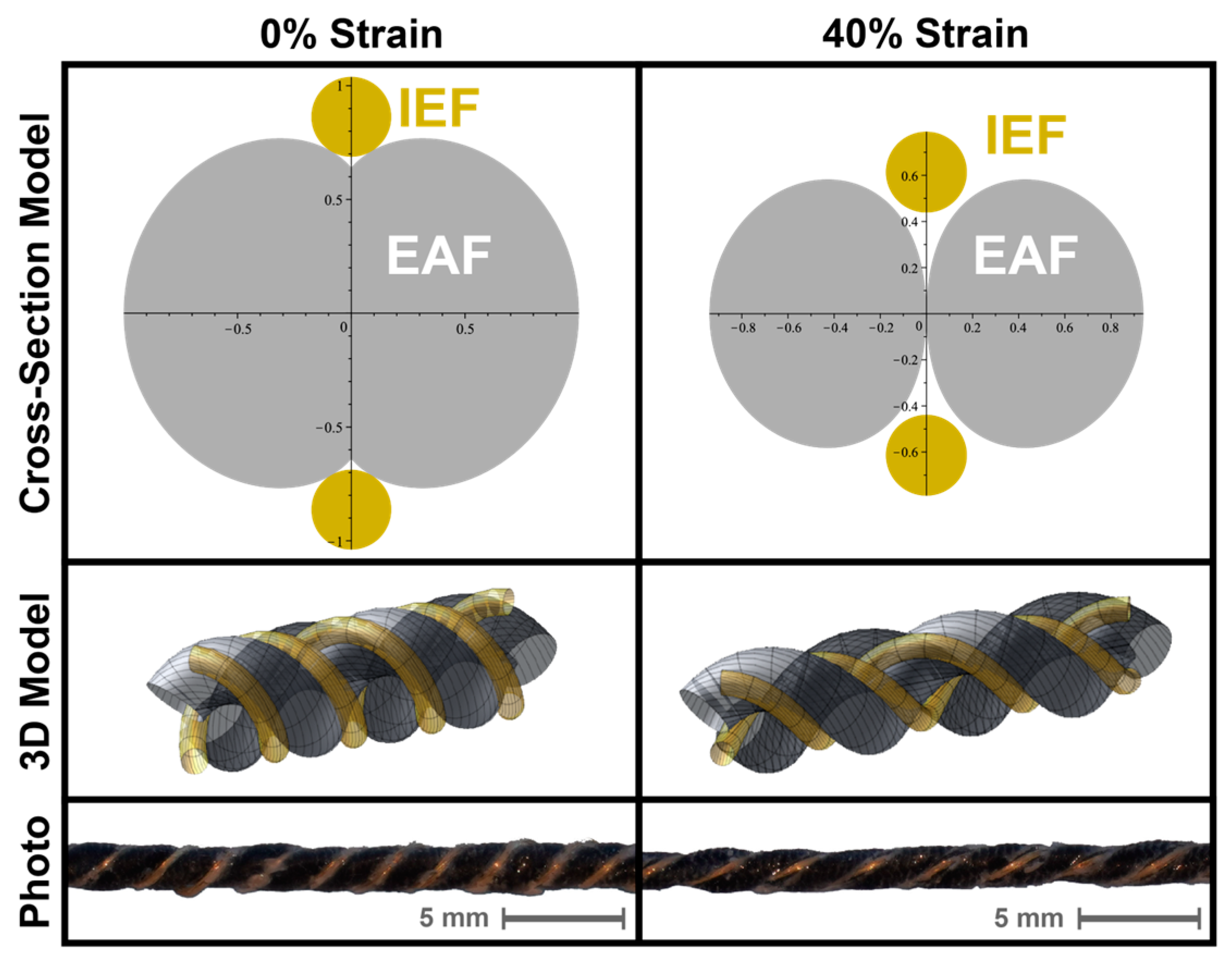
 HACS: Helical Auxetic Yarn Capacitive Sensors that Go Beyond the Theoretical Sensitivity LimitTyler J. Cuthbert, Brett C. Hannigan, Alexander Shokurov, and 1 more authorAdvanced Materials, 2023
HACS: Helical Auxetic Yarn Capacitive Sensors that Go Beyond the Theoretical Sensitivity LimitTyler J. Cuthbert, Brett C. Hannigan, Alexander Shokurov, and 1 more authorAdvanced Materials, 2023The development of flexible strain sensors over the past decade has focused on accessing high strain percentages and high sensitivity (i.e. gauge factors). Strain sensors that employ capacitance as the electrical signal to correlate to strain are typically restricted in sensitivity because of the Poisson effect. By employing auxetic structures, the limits of sensitivity for capacitive sensors have been exceeded, which improves the competitiveness of this modality of sensing. We present the employment of helical auxetic yarns, which have yet to be used as capacitive sensors, likely because there is not a straightforward correlation of how the auxetic character would impact sensor sensitivity. We complete the modeling of helical auxetic yarns to provide insight into ideal sensor variables that would enable us to fabricate sensors that can span a wide range of strains, while also possessing auxetic character. We hypothesized that possessing auxetic character would result in higher sensitivity, which did turn out to be partially correct. We found that the heli-cal auxetic yarn capacitive sensors (which we term HACS) response was dependent on the two variables of i) the ratio of diameters between the two conductive fiber elements, and ii) the initial helical lengths. Depending on these variables, we could obtain sensors that responded to strain with increasing or decreasing capacitances. We found a greater auxetic character resulted in larger sensitivities accessible at smaller strains-a characteristic that is not commonly found when accessing high gauge factors. In addition, we obtained the highest sensitivity for auxetic capacitive sensors reported thus far. We propose a mechanism-that is unique to these sensors-of sensor response that explains both the variable capacitance response and the high gauge factors obtained experimentally .




2021
-
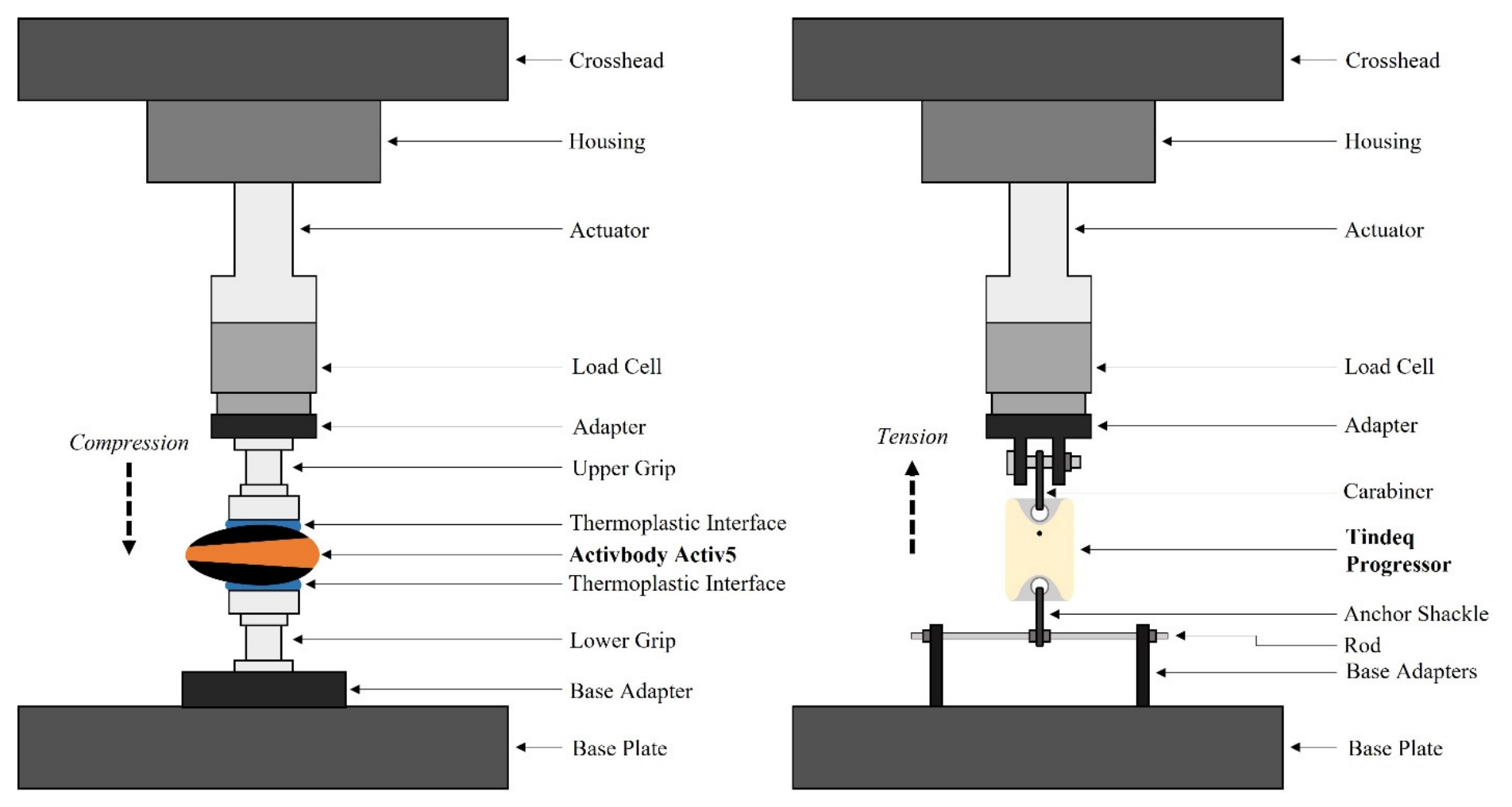 The validity and reliability of two commercially available load sensors for clinical strength assessmentKohle Merry, Christopher Napier, Vivian Chung, and 4 more authorsSensors, 2021
The validity and reliability of two commercially available load sensors for clinical strength assessmentKohle Merry, Christopher Napier, Vivian Chung, and 4 more authorsSensors, 2021Objective: Handheld dynamometers are common tools for assessing/monitoring muscular strength and endurance. Health/fitness Bluetooth load sensors may provide a cost-effective alternative; however, research is needed to evaluate the validity and reliability of such devices. This study assessed the validity and reliability of two commercially available Bluetooth load sensors (Activ5 by Activbody and Progressor by Tindeq). Methods: Four tests were conducted on each device: stepped loading, stress relaxation, simulated exercise, and hysteresis. Each test type was repeated three times using the Instron ElectroPuls mechanical testing device (a gold-standard system). Test–retest reliability was assessed through intraclass correlations. Agreement with the gold standard was assessed with Pearson’s correlation, interclass correlation, and Lin’s concordance correlation. Results: The Activ5 and Progressor had excellent test–retest reliability across all four tests (ICC(3,1) ≥ 0.999, all p ≤ 0.001). Agreement with the gold standard was excellent for both the Activ5 (ρ≥ 0.998, ICC(3,1) ≥ 0.971, \rhoc ≥ 0.971, all p’s ≤ 0.001) and Progressor (ρ≥ 0.999, ICC(3,1) ≥ 0.999, \rhoc ≥ 0.999, all p’s ≤ 0.001). Measurement error increased for both devices as applied load increased. Conclusion: Excellent test–retest reliability was found, suggesting that both devices can be used in a clinical setting to measure patient progress over time; however, the Activ5 consistently had poorer agreement with the gold standard (particularly at higher loads).
-
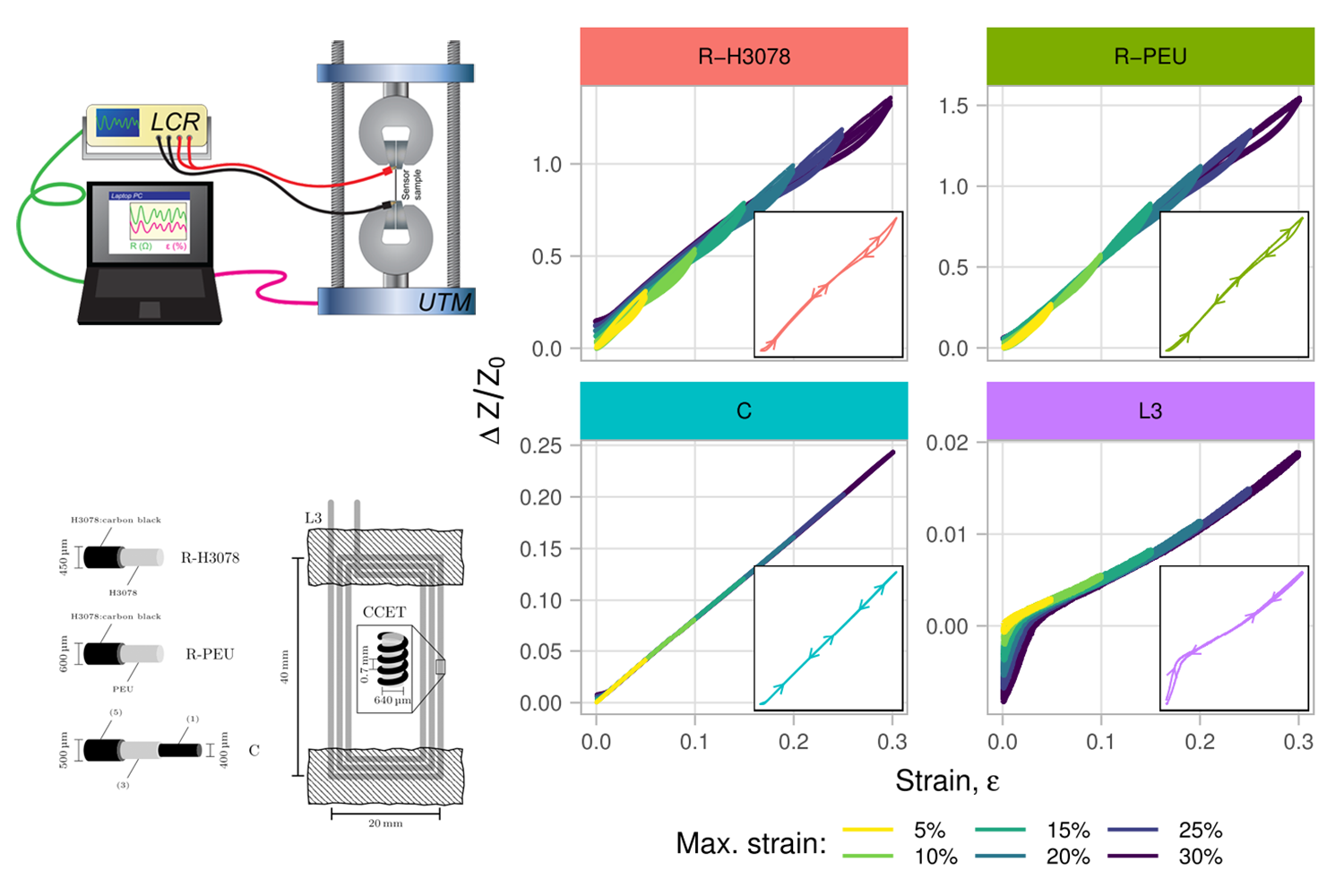 Understanding the Impact of Machine Learning Models on the Performance of Different Flexible Strain Sensor ModalitiesBrett C. Hannigan, Tyler J. Cuthbert, Wanhaoyi Geng, and 1 more authorFrontiers in Materials, 2021
Understanding the Impact of Machine Learning Models on the Performance of Different Flexible Strain Sensor ModalitiesBrett C. Hannigan, Tyler J. Cuthbert, Wanhaoyi Geng, and 1 more authorFrontiers in Materials, 2021Fibre strain sensors commonly use three major modalities to transduce strain—piezoresistance, capacitance, and inductance. The electrical signal in response to strain differs between these sensing technologies, having varying sensitivity, maximum measurable strain rate, and susceptibility to deleterious effects like hysteresis and drift. The wide variety of sensor materials and strain tracking applications makes it difficult to choose the best sensor modality for a wearable device when considering signal quality, cost, and difficulty of manufacture. Fibre strain sensor samples employing the three sensing mechanisms are fabricated and subjected to strain using a tensile tester. Their mechanical and electrical properties are measured in response to strain profiles designed to exhibit particular shortcomings of sensor behaviour. Using these data, the sensors are compared to identify materials and sensing technologies well suited for different textile motion tracking applications. Several regression models are trained and validated on random strain pattern data, providing guidance for pairing each sensor with a model architecture that compensates for non-ideal effects. A thermoplastic elastomer-core piezoresistive sensor had the highest sensitivity (average gauge factor: 12.6) and a piezoreistive sensor of similar construction with a polyether urethane-urea core had the largest bandwidth, capable of resolving strain rates above 300%/s with 36% signal amplitude attenuation. However, both piezoresistve sensors suffered from larger hysteresis and drift than a coaxial polymer sensor using the capacitive strain sensing mechanism. Machine learning improved the piezoresistive sensors’ root-mean-squared error when tracking a random strain signal by up to 58% while maintaining their high sensitivity, bandwidth, and ease of interfacing electronically.
-
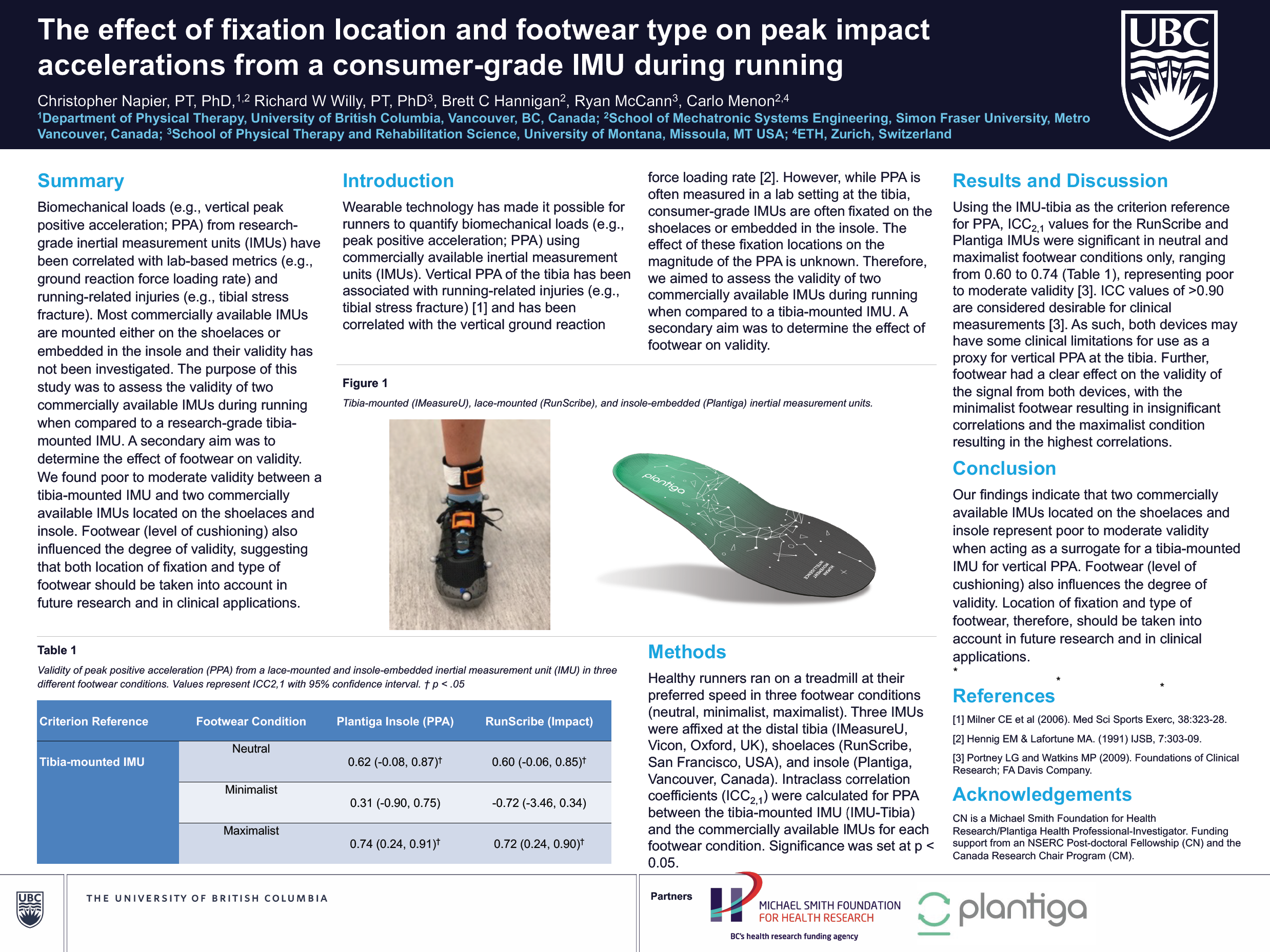 The effect of fixation location and footwear type on peak impact accelerations from a consumer-grade IMU during runningChristopher Napier, Richard W. Willy, Brett C. Hannigan, and 2 more authorsIn XXVIII International Society of Biomechanics, 2021
The effect of fixation location and footwear type on peak impact accelerations from a consumer-grade IMU during runningChristopher Napier, Richard W. Willy, Brett C. Hannigan, and 2 more authorsIn XXVIII International Society of Biomechanics, 2021Biomechanical loads (e.g., vertical peak positive acceleration; PPA) from research- grade inertial measurement units (IMUs) have been correlated with lab-based metrics (e.g., ground reaction force loading rate) and running-related injuries (e.g., tibial stress fracture). Most commercially available IMUs are mounted either on the shoelaces or embedded in the insole and their validity has not been investigated. The purpose of this study was to assess the validity of two commercially available IMUs during running when compared to a research-grade tibia- mounted IMU. A secondary aim was to determine the effect of footwear on validity. We found poor to moderate validity between a tibia-mounted IMU and two commercially available IMUs located on the shoelaces and insole. Footwear (level of cushioning) also influenced the degree of validity, suggesting that both location of fixation and type of footwear should be taken into account in future research and in clinical applications.
-
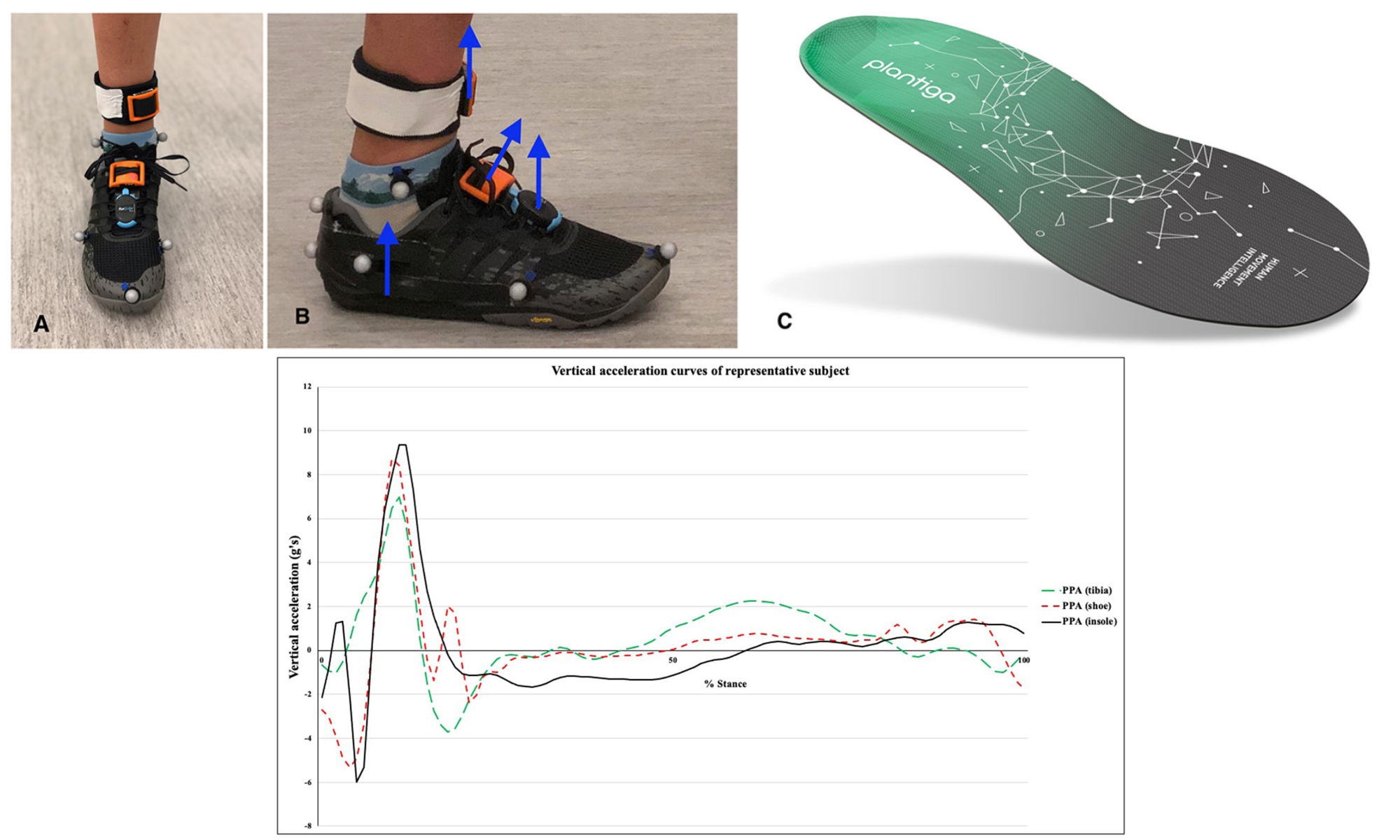 The effect of footwear, running speed, and location on the validity of two commercially available inertial measurement units during runningChristopher Napier, Richard W. Willy, Brett C. Hannigan, and 2 more authorsFrontiers in Sports and Active Living, 2021
The effect of footwear, running speed, and location on the validity of two commercially available inertial measurement units during runningChristopher Napier, Richard W. Willy, Brett C. Hannigan, and 2 more authorsFrontiers in Sports and Active Living, 2021Introduction: Most running-related injuries are believed to be caused by abrupt changes in training load, compounded by biomechanical movement patterns. Wearable technology has made it possible for runners to quantify biomechanical loads (e.g., peak positive acceleration; PPA) using commercially available inertial measurement units (IMUs). However, few devices have established criterion validity. The aim of this study was to assess the validity of two commercially available IMUs during running. Secondary aims were to determine the effect of footwear, running speed, and IMU location on PPA. Materials and Methods: Healthy runners underwent a biomechanical running analysis on an instrumented treadmill. Participants ran at their preferred speed in three footwear conditions (neutral, minimalist, and maximalist), and at three speeds (preferred, +10%, −10%) in the neutral running shoes. Four IMUs were affixed at the distal tibia (IMeasureU-Tibia), shoelaces (RunScribe and IMeasureU-Shoe), and insole (Plantiga) of the right shoe. Pearson correlations were calculated for average vertical loading rate (AVLR) and PPA at each IMU location. Results: The AVLR had a high positive association with PPA (IMeasureU-Tibia) in the neutral and maximalist (r = 0.70–0.72; p ≤ 0.001) shoes and in all running speed conditions (r = 0.71–0.83; p ≤ 0.001), but low positive association in the minimalist (r = 0.47; p \textless 0.05) footwear condition. Conversely, the relationship between AVLR and PPA (Plantiga) was high in the minimalist (r = 0.75; p ≤ 0.001) condition and moderate in the neutral (r = 0.50; p \textless 0.05) and maximalist (r = 0.57; p \textless 0.01) footwear. The RunScribe metrics demonstrated low to moderate positive associations (r = 0.40–0.62; p \textless 0.05) with AVLR across most footwear and speed conditions. Discussion: Our findings indicate that the commercially available Plantiga IMU is comparable to a tibia-mounted IMU when acting as a surrogate for AVLR. However, these results vary between different levels of footwear and running speeds. The shoe-mounted RunScribe IMU exhibited slightly lower positive associations with AVLR. In general, the relationship with AVLR improved for the RunScribe sensor at slower speeds and improved for the Plantiga and tibia-mounted IMeasureU sensors at faster speeds.




2020
-
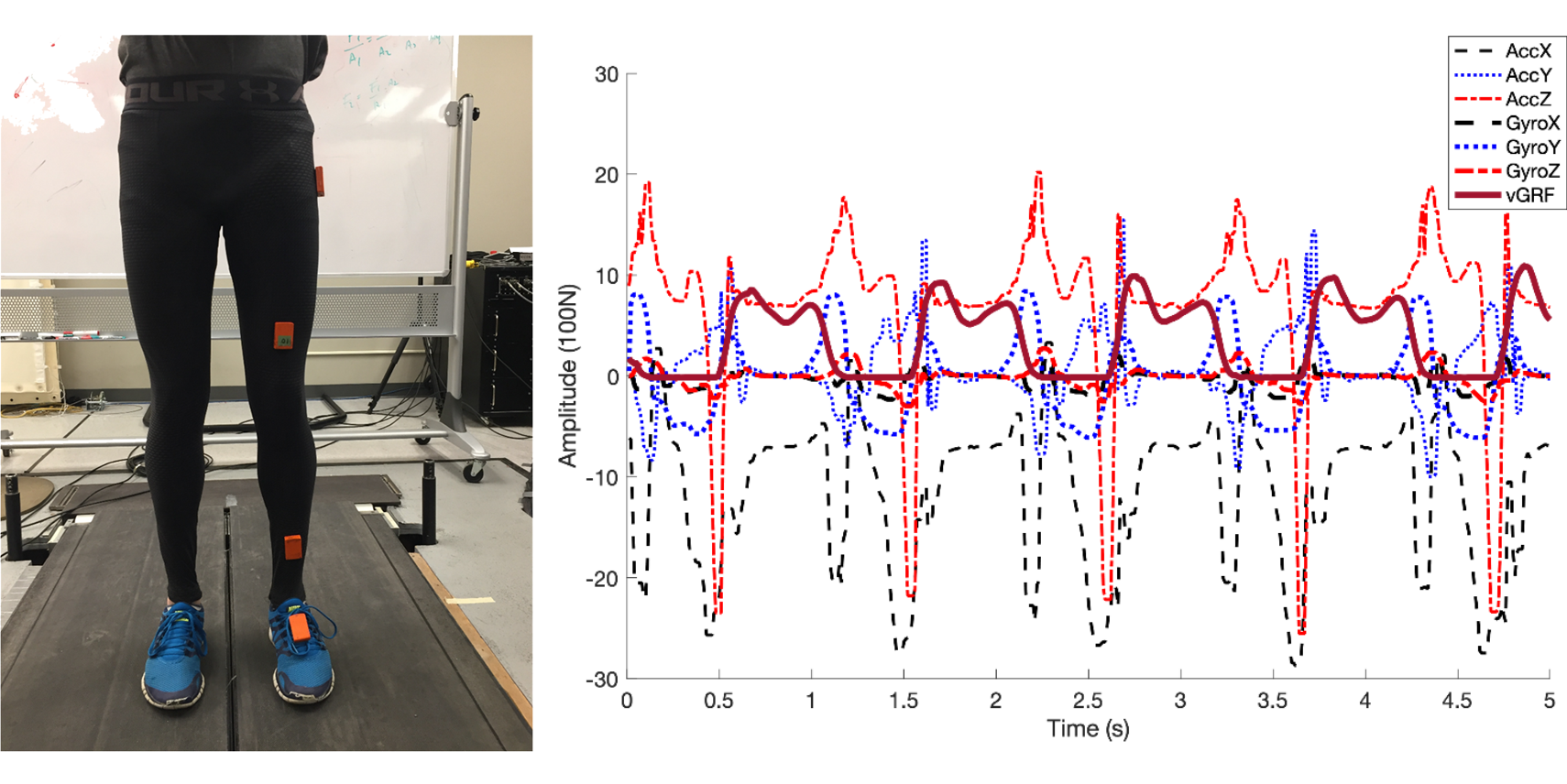 Estimating vertical ground reaction force during walking using a single inertial sensorXianta Jiang, Christopher Napier, Brett Hannigan, and 2 more authorsSensors, 2020
Estimating vertical ground reaction force during walking using a single inertial sensorXianta Jiang, Christopher Napier, Brett Hannigan, and 2 more authorsSensors, 2020The vertical ground reaction force (vGRF) and its passive and active peaks are important gait parameters and of great relevance for musculoskeletal injury analysis and prevention, the detection of gait abnormities, and the evaluation of lower-extremity prostheses. Most currently available methods to estimate the vGRF require a force plate. However, in real-world scenarios, gait monitoring would not be limited to a laboratory setting. This paper reports a novel solution using machine learning algorithms to estimate the vGRF and the timing and magnitude of its peaks from data collected by a single inertial measurement unit (IMU) on one of the lower limb locations. Nine volunteers participated in this study, walking on a force plate-instrumented treadmill at various speeds. Four IMUs were worn on the foot, shank, distal thigh, and proximal thigh, respectively. A random forest model was employed to estimate the vGRF from data collected by each of the IMUs. We evaluated the performance of the models against the gold standard measurement of the vGRF generated by the treadmill. The developed model achieved a high accuracy with a correlation coefficient, root mean square error, and normalized root mean square error of 1.00, 0.02 body weight (BW), and 1.7% in intra-participant testing, and 0.97, 0.10 BW, and 7.15% in inter-participant testing, respectively, for the shank location. The difference between the reference and estimated passive force peak values was 0.02 BW and 0.14 BW with a delay of −0.14% and 0.57% of stance duration for the intra-and inter-participant testing, respectively; the difference between the reference and estimated active force peak values was 0.02 BW and 0.08 BW with a delay of 0.45% and 1.66% of stance duration for the intra-and inter-participant evaluation, respectively. We concluded that vertical ground reaction force can be estimated using only a single IMU via machine learning algorithms. This research sheds light on the development of a portable wearable gait monitoring system reporting the real-time vGRF in real-life scenarios.
-
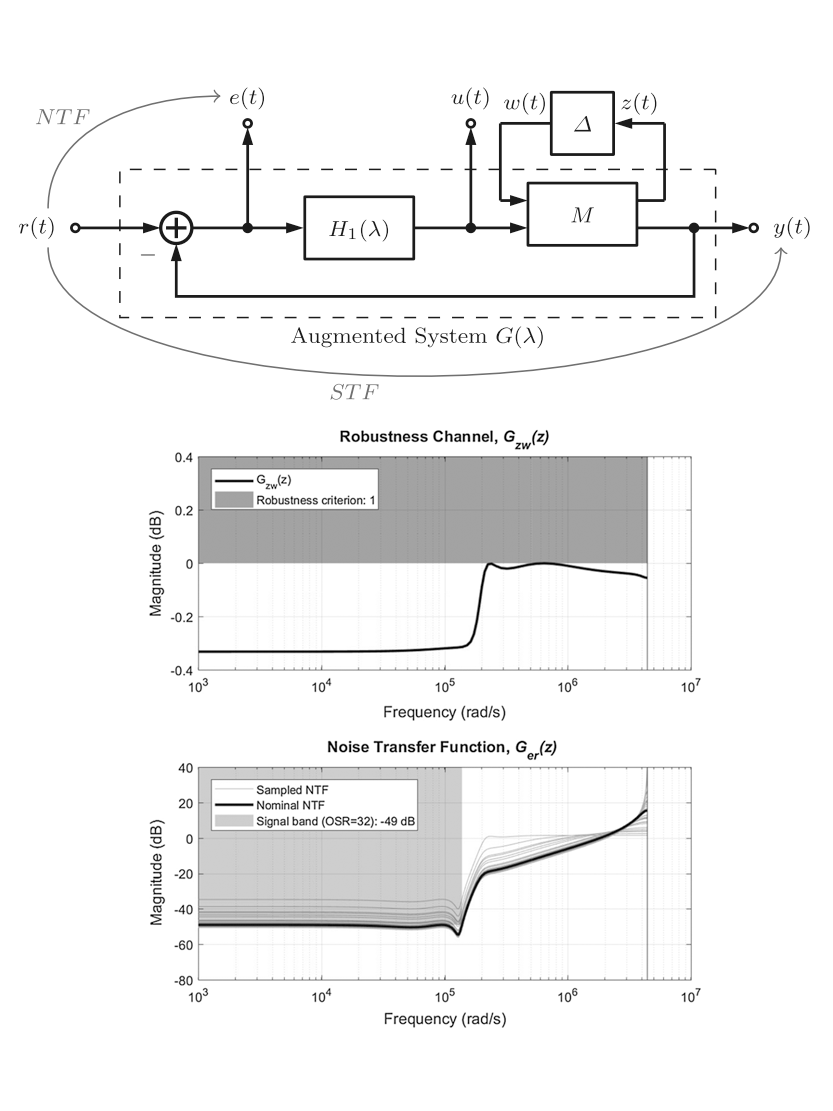 An Optimization Framework for the Design of Noise Shaping Loop Filters with Improved Stability PropertiesBrett C. Hannigan, Christian L. Petersen, A. Martin Mallinson, and 1 more authorCircuits, Systems, and Signal Processing, 2020
An Optimization Framework for the Design of Noise Shaping Loop Filters with Improved Stability PropertiesBrett C. Hannigan, Christian L. Petersen, A. Martin Mallinson, and 1 more authorCircuits, Systems, and Signal Processing, 2020A framework using semidefinite programming is proposed to enable the design of sigma delta modulator loop filters at the transfer function level. Both continuous-time and discrete-time, low-pass and band-pass designs are supported. For performance, we use the recently popularized Generalized Kalman–Yakubovič–Popov (GKYP) lemma to place constraints on the H∞ norm of the noise transfer function (NTF) in the frequency band of interest. We expand the approach to incorporate common stability criteria in the form of H2 and ℓ1 norm NTF constraints. Furthering the discussion of stability, we introduce techniques from control systems to improve the robustness of the feedback system over a range of quantizer gains. The performance-stability trade-off is examined using this framework and motivated by simulation results.


2018
-
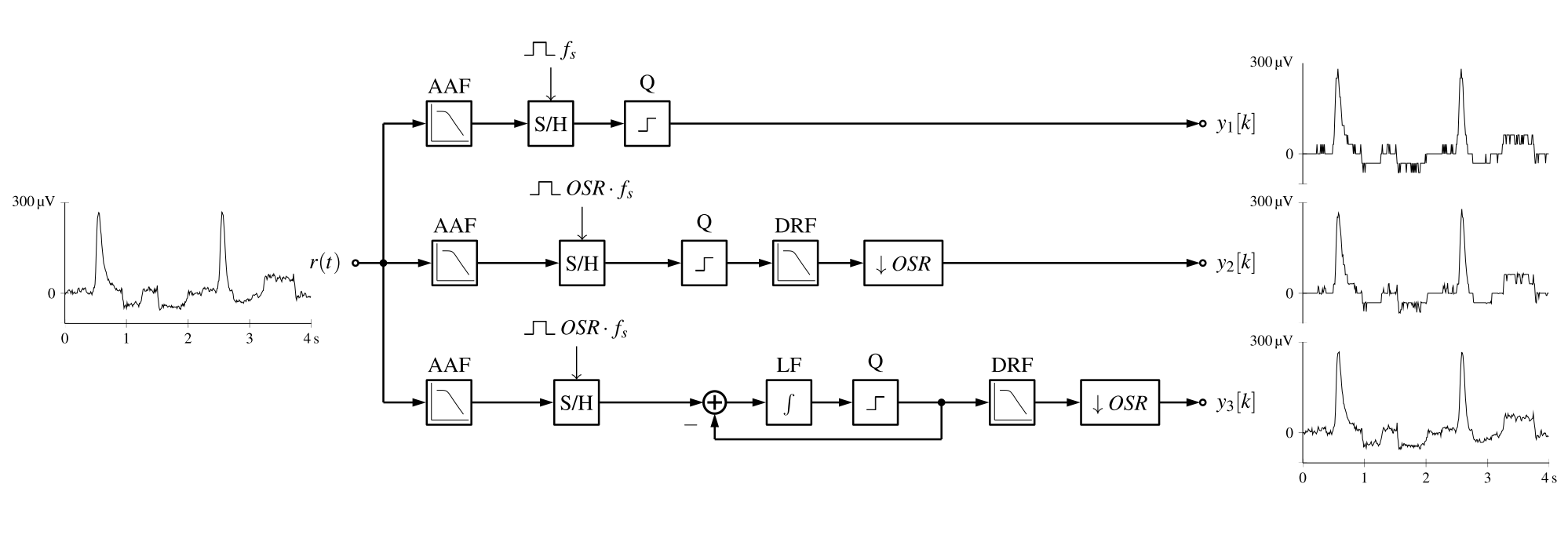 On the Design of Stable, High Performance Sigma Delta ModulatorsBrett Christopher Hannigan2018
On the Design of Stable, High Performance Sigma Delta ModulatorsBrett Christopher Hannigan2018The sigma delta architecture of analog-to-digital (A/D) converters is especially applicable to digitizing most bio-signals. High order single-bit sigma delta modulators provide high resolution and linearity with low circuit complexity but require careful design to avoid unstable states. Many existing methods of designing these systems have few degrees of freedom, rely extensively on simulations, and do not provide guarantees about stability. The problem of designing sigma delta modulators with high performance and a clear indicator of the performance versus stability is addressed in this dissertation. This is done by developing a model of the sigma delta modulator that more accurately represents the system including robustness against the nonlinearities due to the quantizer element. After introducing many stability criteria from literature, those most suited to design are identified and the model adjusted to allow these criteria to be applied. High performance is maintained by using the generalized Kalman-Yakubovic-Popov (GKYP) lemma to maximize noise rejection in the signal band using a semidefinite programming (SDP) framework that also permits the use of H∞, H2, and l1 norm-based stability constraints on the system. Several designs using this framework are presented and their relative merits discussed. Examples include an aggressive noise shaping design to compete with existing methods on the basis of performance and designs with guaranteed stability for a range of input signals. The performance-stability trade-off for the different stability constraints using this work is examined and motivated by simulation results.

2016
-
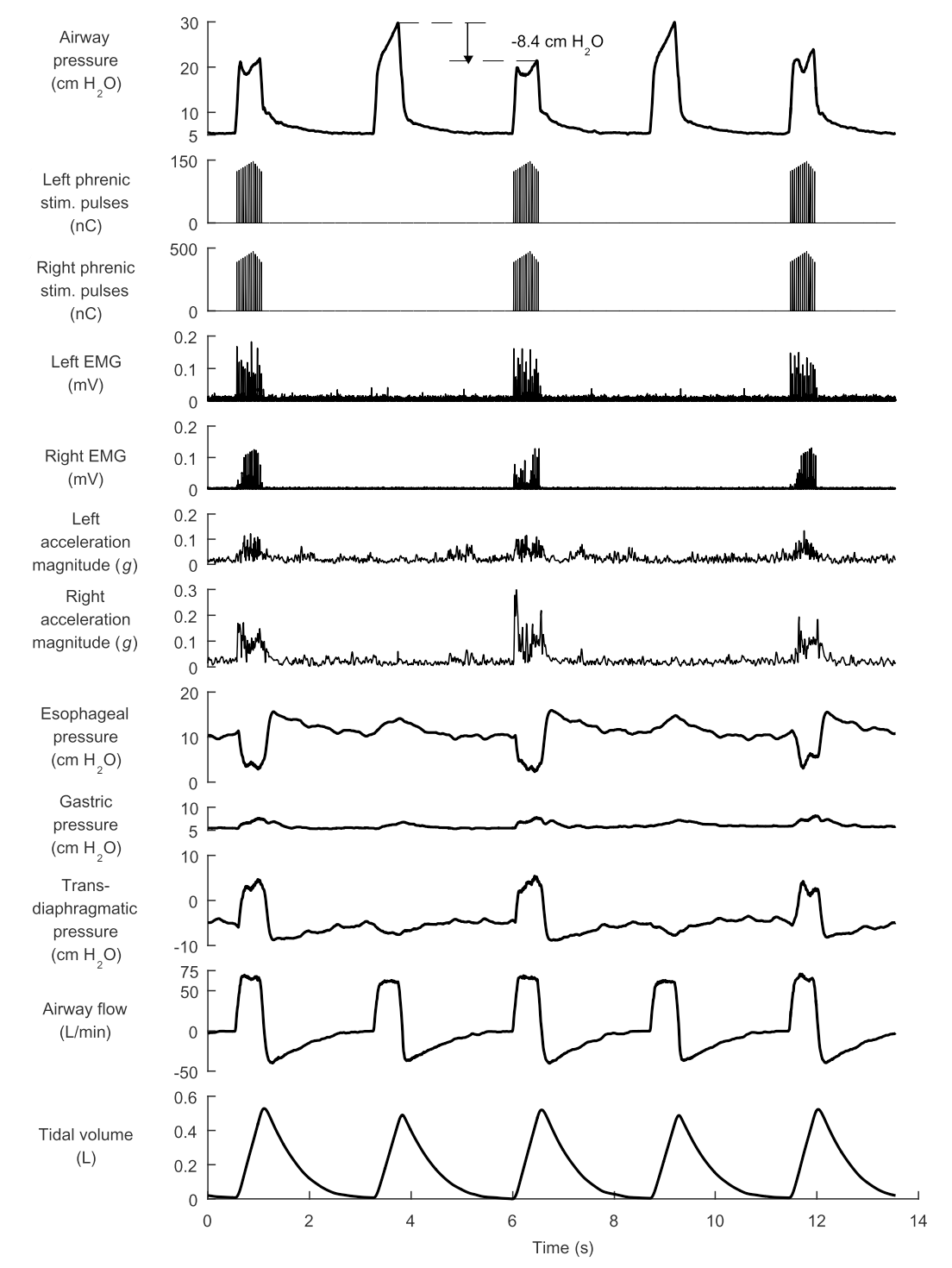
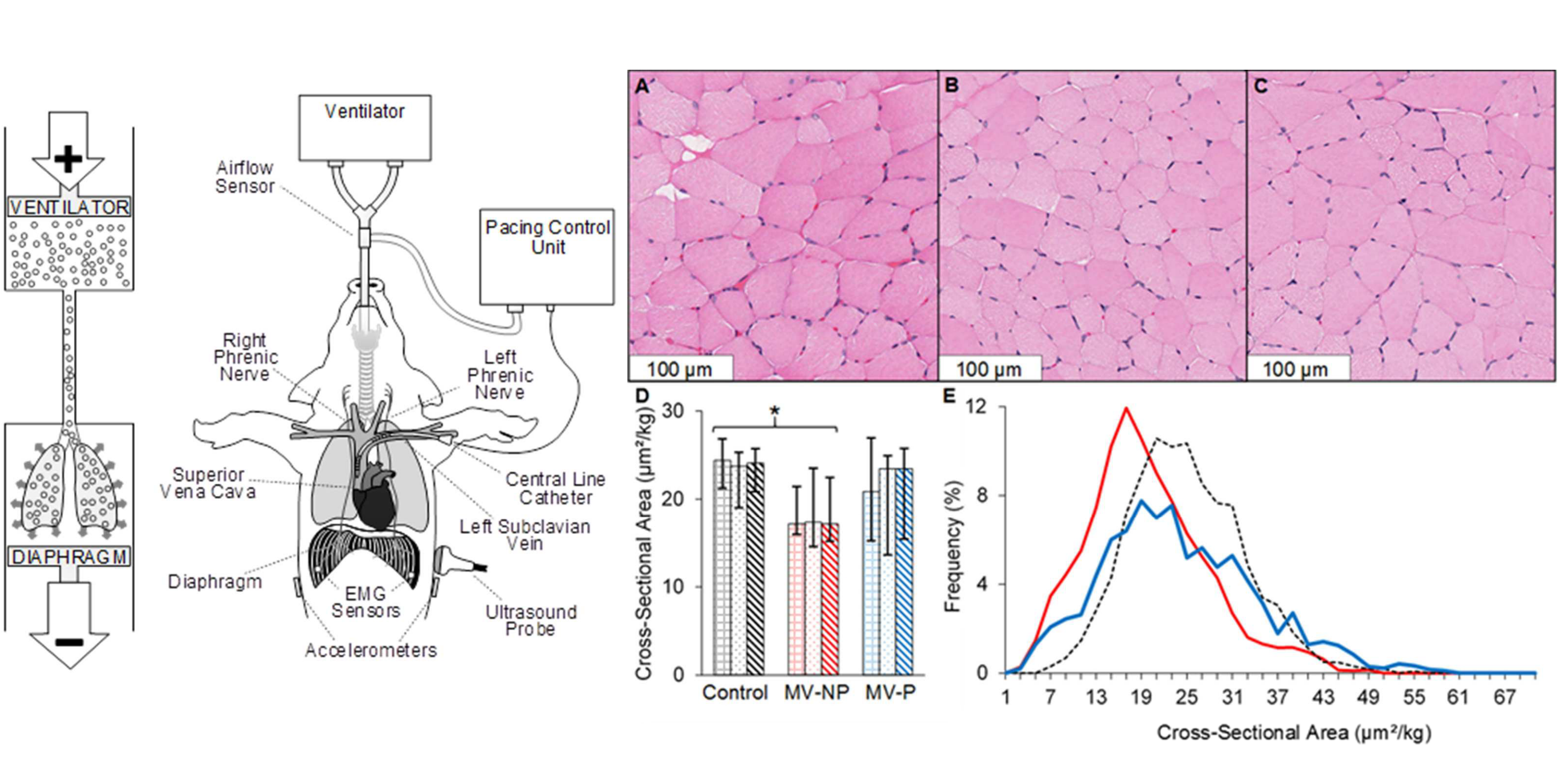 Mitigation of Venitlator-Induced Diaphragm Atrophy by Transvenous Phrenic Nerve StimulationSteven C. Reynolds, Ramasamy Meyyappan, Viral Thakkar, and 10 more authorsAm J Respr Crit Care Med, 2016
Mitigation of Venitlator-Induced Diaphragm Atrophy by Transvenous Phrenic Nerve StimulationSteven C. Reynolds, Ramasamy Meyyappan, Viral Thakkar, and 10 more authorsAm J Respr Crit Care Med, 2016Rationale Ventilator-induced Diaphragm Dysfunction is a significant contributor to weaning difficulty in ventilated critically ill patients. It has been hypothesized that electrically pacing the diaphragm during mechanical ventilation could reduce diaphragm dysfunction. Objectives We tested a novel, central line catheter-based, transvenous phrenic nerve pacing therapy for protecting the diaphragm in sedated and ventilated pigs. Methods Eighteen Yorkshire pigs were studied. Six pigs were sedated and mechanically ventilated for 2.5 days with pacing on alternate breaths at intensities that reduced the ventilator pressure-time-product by 20%-30%. Six matched subjects were similarly sedated and ventilated, but were not paced. Six pigs served as never-ventilated, never- paced controls. Measurements and Main Results Cumulative duration of pacing therapy ranged from 19.7 to 35.7 hours. Diaphragm thickness assessed by ultrasound and normalized to initial value showed a significant decline in ventilated-not paced but not in ventilated-paced subjects (0.84, interquartile range (IQR)=0.78-0.89 vs. 1.10, IQR=1.02-1.24; P=0.001). Compared to Controls (24.6 µm2/kg, IQR=21.6-26.0), median myofiber cross-sectional areas normalized to weight 4 Copyright \textcopyright 2016 by the American Thoracic Society Page 5 of 49 AJRCCM Articles in Press. Published on 08-August-2016 as 10.1164/rccm.201502-0363OC and sarcomere length were significantly smaller in ventilated-not paced (17.9 µm2/kg, Interquartile Range=15.3-23.7; P=0.005) but not in the ventilated-paced group (24.9 µm2/kg, Interquartile Range =16.6-27.3; P=0.351). After 60 hours of mechanical ventilation all 6 ventilated-paced subjects tolerated 8 minutes of intense phrenic stimulation whereas 3 of 6 ventilated-not paced subjects did not (P=0.055). There was a non-significant decrease in diaphragm tetanic force production over the experiment in the ventilated-paced and ventilated-not paced groups. Conclusions These results suggest that early transvenous phrenic nerve pacing may mitigate Ventilator-induced Diaphragm Dysfunction

2015
-
 C14 FRONTIERS IN ASSISTED VENTILATION: Novel Transvenous Phrenic Nerve Pacing System Prevents Diaphragm Atrophy During Mechanical Ventilation: Pre-Clinical Validation In A Porcine ModelS.C. Reynolds, R. Meyyappan, M. Nolette, and 8 more authorsAmerican Journal of Respiratory and Critical Care Medicine, 2015
C14 FRONTIERS IN ASSISTED VENTILATION: Novel Transvenous Phrenic Nerve Pacing System Prevents Diaphragm Atrophy During Mechanical Ventilation: Pre-Clinical Validation In A Porcine ModelS.C. Reynolds, R. Meyyappan, M. Nolette, and 8 more authorsAmerican Journal of Respiratory and Critical Care Medicine, 2015
